
Bruce L. Gary; Hereford, AZ; 2005.04.18
Abstract
This web page describes a simplified procedure for deriving standard magnitudes from both differential images and all-sky photometry observations. When compared with the currently AAVSO-recommended equations the "simplified magnitude equations" (SME) procedure is: 1) more accurate, since it explicitly allows for air mass effects, and 2) more intuitive, easier to use and therefore less prone to undetected mistakes. When used for differential photometry the accuracy is ~0.03 magnitude. When used in a "lazy all-sky photometry" mode (one image, one filter) the accuracy is typically ~0.10 magnitude (suitable for asteroid observing). When used in the "high quality all-sky photography" mode (2-filter, 2-air mass, Landolt) the accuracy is ~0.03 magnitude, which is suitable for creating photometric sequences for uncalibrated star fields. I am suggesting that it be considered by the AAVSO as an alternative to the currently recommended CCD Transformation Equations. A set of constants for use with the SME, illustrated for my telescope below, is needed for the various photometry procedures described conceptually on this web page. It's use is demonstrated with real data on a companion web page, SME_Examples.
When I derived the CCD Transformation Equations as a self-assigned
exercise a few years ago (described at http://reductionism.net.seanic.net/CCD_TE/cte.html)
it just seemed that there should be a simpler way to convert
measurements of star flux in a CCD image to a standard
magnitude. The CCD Transformation Equations recommended by AAVSO were
not only complicated, they were a subset
of the complete equation set used by professionals, and the subset
ignored air mass effects. This
meant that the subset results were less
accurate (at the 0.05 magnitude level). During the past year I have
been evaluating a simplified procedure which retains the air mass
and star color correction terms. I call it "simplified magnitude
equation photometry," or SME photometry.
There are several variants of
SME photometry, corresponding to whether the star field has some
calibrated stars in the image, whether one filter or many filters are
used, and whether a Landolt star field is observed. These various SME
photometry procedures are more intuitive, and they provide
understandable feedback to the user. One of these feedbacks which I now
appreciate as essential is the ability to view a plot to identify
"outlier" standard stars. These outliers can be produced when a
standard star is
unsuitable because it's in fact a variable, or it's a close double that
wasn't noted by the user, or it was too close to the edge of the FOV
where flat field errors were severe - all of which I've encountered.
Perhaps more important, SME
photometry is less likely to produce erroneous results due to user
book-keeping mistakes that go undetected.
The SME photometry procedures range from all-sky (yielding
accuracies of ~0.03 magnitude) to "lazy all-sky" (with accuracies of
~0.10 magnitude). This last one may sound poor, but it is adequate for
most asteroid observers, and it is very quick. It's so simple that I
frequently perform it using a hand caclulator while observing.
I have evaluated each of the SME photometry procedures by repeatedly
observing
standard star fields
and treating them as if they were uncalibrated. This allowed me to
compare derived magnitudes with "truth." I conclude with the following
empirical performances when using various versions of the SME
photometry procedures (in order of easiest to hardest):
While developing and refining the simplified procedure I kept asking
myself why it hadn't been developed and adopted long ago. My tentative
answer is that
it relies upon personal computers with spreadsheets, which were not in
common use until the last decade. It may be true that the simplified
procedure demands too much "conceptual understanding" from the user,
and I reluctantly acknowledge that an automated implementation of it
could be developed (a program that relieves the user of some of
the tedious though
enlightening phases). I am not an enthusiast of using programs someone
else has written, since only the programmer knows the program's
strengths and
weaknesses. In addition, I prefer to "wallow in
dirty data" to get a good "feeling" for the information content of the
measurements and what they are capable of conveying and what they
shouldn't be counted on to convey. I reluctantly warn that anyone who
hates spreadsheets should not bother reading this web page. Maybe
that's the explanation for SME photometry having not been
presented to the photometry community before now, since anyone
considering promoting it knows that many CCD observers hate
spreadhseets.
I believe in reliance upon concepts for solving
problems, as opposed to being given a set of procedures to follow on
blind faith. Therefore, this web page takes care to present the
concepts instead of simply listing a set of procedure to be memorized.
I also like presenting concepts using the simplest approximation first,
then refining it by adding the next level of approximation. The
person who doesn't care about underlying concepts should probably
consider abandoning this web page, because blind faith always
leads to disaster. For those who are merely impatient, who promise to
return to this web page after sampling my examples web page, I
invite you to quickly look over QuickStartExamples
to see these SME photometry procedures demonstrated with real
observational data.
If you're new to photometry, and you'd like to learn why so much effort is needed to produce standard magnitudes, and you're intereseted in the underlying physics of why the entire photometry subject is so complicated, you might want to review the following web page: all-sky photometry basics. That web page is slightly dated, as it is a year old and has evolved into this web page. Then here's my ultimate all-sky photometry web page, meant for the really serious amateur: Serious All-Sky Photometry Tutorial (0.025 mag SE) I think it's the best procedure for the really serious amateur, starting with a slow-paced intro but gradually rising to the formidable.
Just one more caveat before letting you loose with the following
material. I believe that 90% of what people say and believe is absurdly
flawed, and even though I proudly proclaim that only 50% of my
utterences are wrong, I advize the reader to remain skeptical of
everyting on this web page. This is especially true during the early
phases of it. Only after Arne has endorsed it, if he ever does, will
you be safe in assuming that it is not seriously flawed.
For every telescope/filter/CCD system there is a simple relationship
between a star's flux and its magnitude. Let's begin with two
simplifying assumptions: 1) there is no atmosphere, and 2) by some
fortunate circumstance the telescope system is constructed so that its
spectral response perfectly matches the response corresponding to the
standard magnitude system. For these assumptions the following relation
would exist:
(1) V = Z - 2.5 * LOG ( F / g )
where V is the V-band magnitude, Z is a zero-shift constant for the
telescope system, F is the star's flux, g is the exposure time (i.e.,
"gate time"), and LOG is a 10-based logarithm. The term "flux" refers
to the sum of counts within an aperture that includes all of the star's
light minus the sum of counts that would be expected if the star were
not present (based on the
average sky background level). If the photometry aperture is chosen to
be small (in order to maximize SNR), then F = F' / f, where F' is the
flux measured using a too-small aperture and "f" is the ratio of counts
using the same aperture to the counts from use of a large aperture (and
"f" is established from measurements of a bright star in the same
image). When I process an image of a very faint object my aperture is
usually chosen so
that f is in the range 0.95 to 0.98. Note that by dividing "F"
by "g"
we are taking the logarithm of
the rate at which counts are accumulating on the CCD attributable to
the star of interest and this renders the equation appropriate for any
exposure time. The term Z most strongly depends on the
aperture, filter and CCD characteristics, although it will change
slowly as dust accumulates on the SCT corrector plate (or the mirror
coating degrades on an open tube telescope).
(2) V = Z - 2.5 * LOG ( F / g ) -
K * m
where K [magnitudes/air mass] is the atmosphere's zenith
extinction
coefficient and m = air mass. (Apologies for using m
for
air mass, instead of the customary X symbol; I come from the
atmospheric sciences where we use m.)
Consider a telescope/CCD system with the following values for the
V-magnitude equation constants:
(4) V = 19.54 - 2.5 * LOG ( F / g ) -
0.14 * m - 0.09 * C
Let's consider the power of this equation. Suppose an
interesting star is discovered and there aren't any charts for it, but
we have a CCD image that begs for analysis to get the star's V-band
magnitude. Assume we measured the star's flux to be 10,000 counts on an
image with an exposure time of 100 seconds, taken at an air mass value
of 2.0. What can we say about the star's magnitude? Well, the
calculation is so simple we can almost "do it in our head." V = 19.54
-2.5 * LOG ( 100) -0.14 * 2.0 -0.09 * C. We don't know star color yet,
so we'll start by assuming it's a typical star, with color C = 0
(that's why I defined C the way I did; more on this later). This means
that for now the last term can be dropped. We then have V = 19.54 -2.5
* 2 - 0.28 = 14.26.
Since a measurement is not a measurement unless it also has an
uncertainty assigned to it, we need to propogate errors and learn how
accurate this magnitude is likely to be. There are two components to
accuracy: 1) noise-related "stochastic" uncertainty (SEs), and 2)
estimated systematic calibration errors (SEc). The first one is simple
to calculate, since usually it is merely 1/SNR. If our star flux
(10,000 counts) has SNR = 100, then SEs = 0.01 magnitude. Systematic
uncertainties due to calibration errors (SEc) are difficult to estimate
(I use the term "estimate" on purpose). As I'll describe below, it is
possible to assign uncertainties for each of the constants in the above
equation. For example, the constants given above are for my system at
one stage of its calibration, and I have reasons for adopting 19.54 +/-
0.02, 0.14 +/- 0.01 and 0.09 +/- 0.01. If C = 0.0 +/- 0.4, then we can
propogate errors to arrive at V = 14.26 +/- 0.04.
How could we achieve such an apparently good result without the fuss
of laborious all-sky calibrations or CCD Transformation Equations? The
answer is that we in fact did do the all-sky calibration, but it was
done maybe months ago when we established values for the constants in
the magnitude equation. We're just avoiding doing an all-sky
calibration every night we observe by assuming that nothing about our
telescope configuration has changed from the time we calibrated it. And
as for CCD Transformation Equations, we haven't done them yet given
that we assumed a star color instead of deriving it. But now it's time
to demonstrate how easy it is to derive the star's color, the paramter C.
Deriving
Star Color Using Iterations
Consider a telescope with the following magnitude equation for
R-band:
(5) R = 19.77 - 2.5 * LOG ( F / g ) - 0.12 * m - 0.15 * C
Suppose we have a 100-second R-filter exposure at m = 2.0 from which
we measure a star flux F = 22,000 counts. Assuming C = 0 for the
moment, we calculate R = 13.67. We can now test our assumption
that C = 0. We have a tentative V-R = 0.59. This corresponds to C =
0.28 (recalling that C = V - R - 0.31), and this value for C differs
from our assumed C = 0.00. Let's repeat the V and R calculations using
C = 0.28. Doing this yields V = 14.21 and R = 13.29. This corresponds
to C = 0.28. One more iteration yields the same V = 14.20 and R = 13.58
and C = 0.30 (note that round-off errors are present). No more
iterations are necessary since we've achieved convergence with just
three iterations.
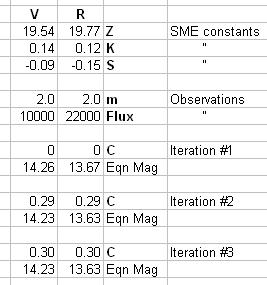
Figure 1. Spreadsheet showing 3 iterations for converting
V and R flux measurements to V and R magnitudes. The final iteration is
self-consistent with the star color term in the magnitude equations.
This example shows that anyone with a calibrated telescope system
can make their own star chart sequences without having to observe
Landolt areas (at many air mass values). This can be done using just
two images of the uncalibrated star field, preferably using V and R
filters (although any two filters will work).
The same spreadsheet can be used to propogate errors, both
stochastic and systematic, using SNR and adopted uncertaintis for the
"SME constants." When this is done the star color uncertainty component
is reduced and we get the following results for this example: V = 14.23
+/- 0.04 and R = 13.63 +/- 0.04. In this particular example the
solution change produced by iterating was small, and the estimated
accuaracy improvement was also small, but for very red or very blue
stars the changes would be larger and the accuracy improvement would be
more dramatic.
Star Color Definition
I have chosen to define star color using V-R-0.31 instead of B-V for
a couple reasons.
First, I prefer V-R because for a typical amateur telescope system R
is ~70 times easier
to measure than B! This dramatic ratio is
due to the fact that a typical star has 8.3 times more flux at R than
B, and since observing time for a given SNR is proportional to the
square of flux ratio it takes ~70 times as long to measure a typical
star with a B filter than the R filter (to the same SNR). Second, a
typical star has V-R ~ 0.3, so using a parameter in which ~0.3 is
subtracted from V-R means that when you're dealing with a star of
unknown color you can merely delete the term (or set it to zero) and
proceed to a "best current information" solution.
V-R
colors
are highly correlated with B-V colors for normal stars. It is therefore
possible
to use a
converting equation when dealing with standard stars that have only B
and V magnitude, which is the case for most Landolt stars. I find that V-R
= 0.01 + 0.57 * (B-V) does an adequate job of converting from one
color to the other. To see a graph showing how good this
converting equation is click on V-R vs B-V.
Since ~3/4 of the Landolt stars have only B and V magnitudes, I have
adopted this conversion routine for all Landolt stars. It shouldn't
matter which of the following star color equations is used:
(6) C = V - R - 0.31, which for most stars
is equivalent to
(7) C = 0.57 * (B-V) - 0.30
The typical discrepancy between star color derived the two ways is
<0.02, and this produces a negligible contribution to the final
accuracy uncertainty when using SME procedures. Highly reddened stars
can have errors of ~0.10 magnitude, but even this error propogates to
small errors (for amateur work) in the SME magnitude solution.
Generalizing the Previous Procedure
(7) B = Zb - 2.5 * LOG ( Fb / g ) - Kb * m + Sv * C
(8) V = Zv - 2.5 * LOG ( Fv / g ) - Kv * m + Sv * C
(9) R = Zr - 2.5 * LOG ( Fr / g ) - Kr * m
+
Sr *
C
(10) I = Zi - 2.5 * LOG ( Fi / g ) - Ki * m + Si * C
and for unfiltered observations we can even define a new magnitude
equation for estimating either V or R magnitudes:
(11) Cv = Zcv - 2.5 * LOG ( Fc / g ) - Kcv * m +
Sc *
C (for
estimating V-magnitude)
(12) Cr = Zcr - 2.5 * LOG ( Fc / g ) - Kcr * m +
Sc *
C (for
estimating R-magnitude)
Note that an unfiltered flux contains more information about R than
about V, since
about twice as many R photons are registered than V photons for a
typical amateur telescope system. Therefore we should expect better
performance for Cr than Cv. Asteroid observers who
emphasize astrometry over photometry usually observe unfiltered so they
can do a better job of estimating R-magnitude than V-magnitude, and
they might want to consider using the Cr equation.
For a calibrated telescope/filter/CCD system there is a simple
relationship between a star's flux and its magnitude. For example, for
my 14-inch Celestron the following relations exist:
Figure 2. Simplified magnitude equations for a 14-inch
telescope (Celestron CGE-1400), Custom Scientific filters, Celestron
f/7 focal reducer and SBIG ST-8XE CCD, located at a 4600-foot altitude
site in Southern Arizona. The last two equations are for converting
unfiltered (Clear filter) fluxes to V and R equivalent magnitudes.
The symbol "C" is star color, defined in the text.
The coefficients in the figure are for one telescope system, and
have been determined by a process to be explained in a later section.
The constants (for Zj, Kj and Sj, where j represents a filter
choice) are stable from night to night, for many months at a time, and
they are unaffected by the CCD cooler setting. The
zero-shift constant can change if a different amount of dust is present
on the mirror of an open tube telescope or corrector plate for a
Schmidt-Cassegrain telescope. If the mirror loses reflectivity with
time this constant will also drift. If the observing site exhibits
a seasonal variation for zenith atmospheric extinction then small
adjustments to the zenith extinction coefficient will have to be made
(solved for). If
thin cirrus clouds are present, or volcanic ash is present in the
stratosphere (smoothly distributed horizontally), the zenith extinction
value will have to be solved for independent of any concerns about
mirror reflectivy changes and corrector plate dust accumulation. The
star color sensitivity
coefficients shouldn't change, unless you add or remove a focal reducer
(for example), but if they have not been determined
well from previous observations of calibrated star fields then they are
candidates for easy solution each night.
Consider a calibrated telescope system with a simple magniutde
equation like the following:
(13) V = 19.56 - 2.5 * LOG ( Fv / g ) - 0.17 * m -
0.09 * C
where Fv = V-band star flux
(corrected for any small aperture effects), g = exposure
time [seconds], m = air mass, and star color C =
0.57 * (B-V) - 0.30 or C = V - R - 0.31 (either version is OK).
On the right side of the equation everything is either known or
measured, except maybe star color, C. On those occasions when C
is not
known, an iterative process can be used to determine it. This is done
by first assuming that C =0 (which is true for typical stars
with
V-R = 0.3, or B-V = 0.5), then calculating first iteration estimates
for V
and R, where R-band observations are processed using an
equation similar to (1), as
illustrated here for my telescope:
(14) R = 19.74 - 2.5 * LOG ( Fb / g ) - 0.13 * m -
0.11 * C
After the initial iteration, producing V and R estimates, these new V
and R
values are used as input for a second iteration.Usually,
only two
or three
iterations are necessary to achieve a stable solution.
There is nothing "incestuous" about this procedure. Only one pair
of values for V and R will produce internal consistency.
The SME iteration procedure just described can be used when images
of the region of interest (ROI) have been made using two filters (at
the same approximate air mass). Notice that we did not need
observations of
Landolt star fields. I refer to this procedure as "Medium Quality
All-Sky SME
Photometry." This SME procedure should have an accuracy of ~ 0.05
magnitude.
Using Landolt Areas (High
Quality All-Sky SME Photometry)
An improvement over the preceding procedure would be to observe
Landolt areas on the same night as the ROI. I usually observe a high
air mass (m = 2.5 to 3.0), low air mass (m ~ 1.20) and a same air mass
(as the ROI) set of Landolt areas each evening. The high and low air
mass Landolt areas are most useful for refining the night's zenith
extinction coefficient, the Kj parameters. All three landolt
areas can be used to refine the system's sensitivity to star color, the
Sj parameters (as demonstrated on the companion web page). With
a sufficient number of stars (such as 20 or
30) it is even possible to establish a value for the "air mass times
star color" coefficient. If you're constrained for observing time
there's small loss in omitting
the high and low air mass Landolt areas, provided you are confident of
most of the SME constants and coefficients.
Not all Landolt areas are created equal. Some have more 4-colr
information than others. Some are more spread out which is not useful
for small CCD field of views. My favorite Landolt area is at 09:56:38
and -00:29:00 (which I refer to as LA0956). I can fit into my FOV (24 x
16 'arc) 15 stars with BVRI magnitudes.
The QuickStartExamples
web page demonstrates the concepts of this SME procedure.
Using Chart Sequences
(Differential SME Photometry)
SME Procedure #4: Low Quality All-Sky with Two Images
(multi-filter, one air mass, no Landolt)
This is the situation of two (or more) filter band images of an
uncalibrated star
field and no observations of a Landolt area. This SME procedure
is an improvement over the previous one by including an attempt to
measure star colors using an iterative process. If good star colors are
in fact determined then they will lead to improved magnitudes for very
red and very blue stars, but there will be only small improvements for
stars with typical colors. All SME constants and coefficients retain
their nominal values. Star colors are estimated using V and R
measurements (or B and V measurements). An iteration procedure is used
to refine the V and R equation magnitudes based on a previous
iteration's V and R solution. No extinction adjustments are made with
this procedure.
Case 1:
Adopt telescope calibration from one night (2005.03.27) and apply
it to
observations of "pretend Landolt areas" 6 nights later (2005.04.02)
with no extinction solution.
BLU SE = 0.043 VIS SE =
0.030 RED SE = 0.038 INF
SE = 0.054 CV SE = 0.087
CR SE = 0.076
![]()
SME Procedure #5: Medium Quality All-Sky Four or More Images
(multi-filter, multi air mass, no Landolt)
Case 1:
![]()
SME Procedure #6: High Quality All-Sky with Many Images
(multi-filter, multi air mass, Landolt)
This SME procedure employs two (or more) filter band images of an
uncalibrated star
field plus the same filter images of Landolt areas at two or more air
mass values, one of which is similar to that of the uncalibrated field.
Typically, 20 to 30 Landolt stars are included and this permits a
useful re-measure to be made of the star color sensitivity Sj
parameters (for the filters used), a determination of extinction
coefficient Kj values, as well as a measurement of the
zero-shift constants Zj for each filter. Indeed, this is the
type of observing required for calibrating the telescope system (the
only difference being the unknown star field observations, which can be
deleted for the system calibration task).
Case 1:
Derive telescope calibration constants "from scratch" (2005.03.27)
using several Landolt areas at several air masses.
This case is simply the performance of the same Landolt star fields
used for the SME solution, which contains some "circularity" so may be
considered a lower limit to performance.
BLU SE = 0.028 VIS SE = 0.017
RED SE = 0.028 INF SE = 0.022
CV SE = 0.057 CR SE = 0.049
![]()
E-mail: b g a r y @ u m i c h . e d u
____________________________________________________________________
This site opened: March 24, 2005. Last Update: January 29, 2008