Bruce L. Gary; Hereford, AZ; 2004.11.22
ABSTRACT
This
web page suggests that remote sensing systems for such things as
"altitude temperature profiles" be evaluated using an alternative to
the customary plot of SE accuracy versus altitude. A new measure for
performance is suggested in which each retrieved temperature profile is
compared with a "kernel layer averaged temperature profile," and a set
of these profile differences is used to derive SE versus altitude. The
virtue of this new performance measure is that it should quickly show
the user of the remote sensor whether its performance is close to
optimum. Specifically, it should provide a simpler way to assess the
need for improving calibration, retrieval stratification procedures,
instrument stability and radiometer stochastic noise level. [More text
coming]
Links Internal to this Web Page
Introduction
Averaging Kernel
Basics
Typical
RMS Within Averaging Kernel Layers
Example
of Expected Performance
Clever Retrieval
Algorithms
For a remote sensing system that retrieves "altitude temperature
profiles" it is customary to describe performance accuracy with a plot
of SE uncertainty versus altitude. In order to improve performance
several things can be done: 1) radiometer noise figure can be reduced
(to lower stochastic uncertainties), 2) systematic errors can be
reduced by performing better calibrations, 3) more observables can be
measured (either more frequenceies or more elevation angles), and 4)
more sophisticated retrieved procedures can be developed. Each of these
improvement possibilities requires a great amount of effort. These is a
tendency to think that if only a better radiometer (with a lower noise
figure) could be bought, or if only more frequencies or elevation
angles could be measured during an observing cycle, or if only all
calibrations could be established with great accuracy, the resultant
profiles of SE performance could be improved to arbitrarily small
values (high accuracy).
Alas, there is a limit to what can be achieved by all these
strategies, and it is a fundamental limit imposed by the physics of
remote sensing. It is my opinion that the performance levels currently
achieved by Dr. M. J. Mahoney, using the JPL Microwave Temperature
Profilers, is very close to this ultimate performance. The fundamental
performance limit has to do with "averaging kernels." This web page
attempts to show typical limits using a "best possible" averaging
kernel.
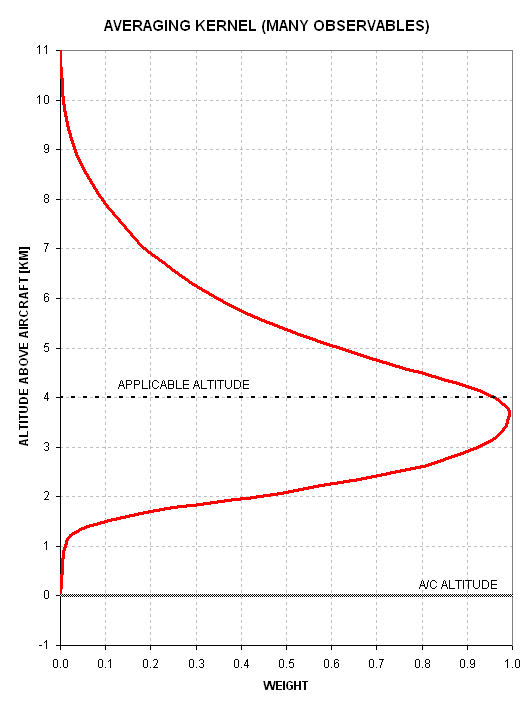
An averaging kernel is obtained by multiplying weighting functions by an appropriate set of retrieval coefficients. Each weighting function starts with a value of 1.00 at flight level and decreases exponentially (approximately) with an e-folding altitude scale height that is the reciprocal of the local atmosphere's absorption ccoefficient [Nepers/km]. It is desireable to use retrieval coefficients that produce an averaging kernel that is "narrow." The following illustrates a best possible (narrowest possible) averaging kernel.
Figure 1. Averaging kernel (red) obtained using at
least a dozen observables with low noise. The "applicable altitude" for
the averaging kernel is at an altitude 4 km above flight level.
This figure provides insight into what is actually measured when
retrieving air temperature at 4 km. The retrieved air temperature is
actually the weighted average of air temperature, where the averaging
kernel is the weighting function. In other words, it is approximately
correct to state that when the MTP retrieves an air temperature for an
altitude 4 km above flight level the value that is retrieved is
actually a layer average, and the layer in question extends from about
2 km to 5.5 km (using "full-width, half-maximum" to describe the
layer).
A profile of retrieved air temperature is built from a series of
such layer average results. For example, the following figure shows the
relationship between two averaging kernels.
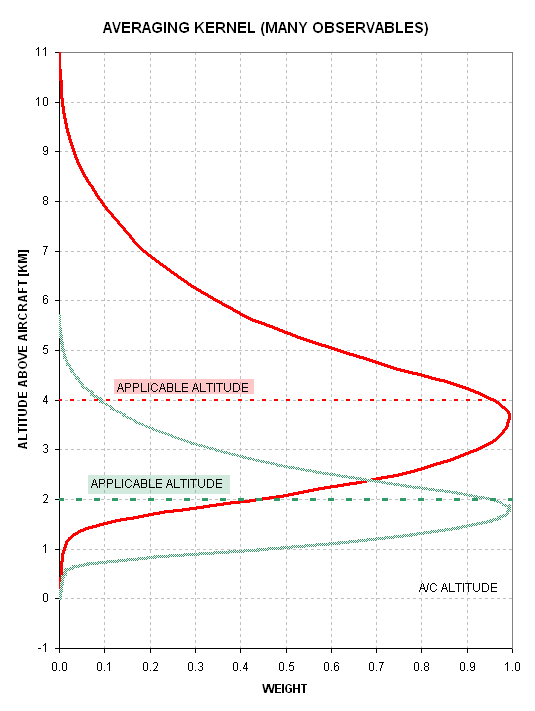
Figure 2. Two averaging
kernels, one for retrieved air temperature at 4 km above flight
altitude (red) and another for 2 km (green).
The 2 km averaging kernel is narrower than that for 4 km, and this
suggests that accuracy should be best close to flight level (which it
always is).
Clearly, the reason narrower averaging kernels produce more accurate
results is that the air temperature at the applicable altitude is more
likely to be the same as the layer average. It may be possible to
achieve any desired accuracy for a layer average temperature, but SE
performance is rarely presented this way. For the person who wants to
know how well a remote sensing system is performing, for the purpose of
deciding whether additional improvements should be attempted, SE
performance shouldn't be derived by comparing retrieved temperature
profiles with actual temperature profiles, as is customarily done;
instead, SE
performance should be derived by comparing retrieved temperature
profiles with layer average temperature profiles.
It will be useful to give a name to this new SE performance. Allow
me to suggest the name: Kernel
Temperature Performance, or KTP.
Think of KTP as an plot, versus altitude, of RMS difference between
"retrieved air temperature" and "kernel layer averaged temperature." A
KTP plot can be expected to be "flat" versus altitude, with
possibly a value of < 1.0 K throughout the range of applicable
altitudes associated with the retrieved profile. This should be the
case for all geographic and seasonal regimes, provided attention is
given to the use of optimal retrieval procedures (stratified retrieval
coefficients, etc) for all regimes. A plot of KTP should therefore be
useful in assessing when additional attention should be given to a
specific mission's MTP calibration or retrieval analysis.
Typical RMS Within Averaging Kernal Layer
In this section I want to establish an appreciation for the
importance of the difference between air temperature at an altitude and
the "averaging kernel layer average temperature." This difference will
grow with averaging kernel layer thickness. I will use the following
abbreviations:
W = full-width/half-power layer thickness, using
the "best possible" averaging kernel shape (given above),
Tw = layer-average temperature using an averaging
kernel with width W
Since the averaging kernel shape is assymetrical about the
applicable altitude, with a long "tail" on the far side of the
applicable altitude, it will be necessary to specify whether the shape
is the same as shown in the figures above (for retrieved air
temperature above flight level) or reversed (for below flight level).
In deriving a plot of Tw versus altitude with respect to flight
altitude the appropriate shapes will be used, i.e., reversal will occur for below
flight level and the shape will be "scaled" for the applicable altitude
to flight level distance. I note here that for applicable altitudes far
from flight level the best possible averaging kernel shape cannot be
achieved (for the far side) since there are no observables to sharpen
the far side of the averaging kernel. Thus, by using one shape, simply
scaled for distance and reversed for the below flight level regime, the
calculated difference of T(z) and Tw(z) will be an under-estimate (on
average) of the difference profile.
For a specific radiosonde (RAOB) and specific flight altitude I
shall calculate dTw(z), which is simply Tw(z) - T(z). When this is done
for many RAOBs it iwll be possible to calculate RMS(z), or the RMS
deviation of the many dTw(z) profiles. RMS(z) for other aircraft flight
levels can be calculated, but since the bulk of an aircraft's time is
spent at a typical cruise altitude I will restrict my calculations to
these most relevant altitudes. For the DC-8 this median altitude is
~11.4 km, and for the ER-2 it is ~19.4 km. Hence, I will generate only
two RMS(z) traces. These RMS(z) traces will represent the best possible
retrieved temperature profile performance that can be achieved using an
MTP.
Note that a trace of RMS(z) for the DC-8 aircraft placed at 11.4 km
will be valid only for the region and season associated with the RAOBs
used. Many sets of "best possible" RMS(z) performance traces could be
generated, but that is not my purpose here. I will choose just one
region and season (one mission for which I have the required archive),
and use it to demonstrate the central concept of this web page.
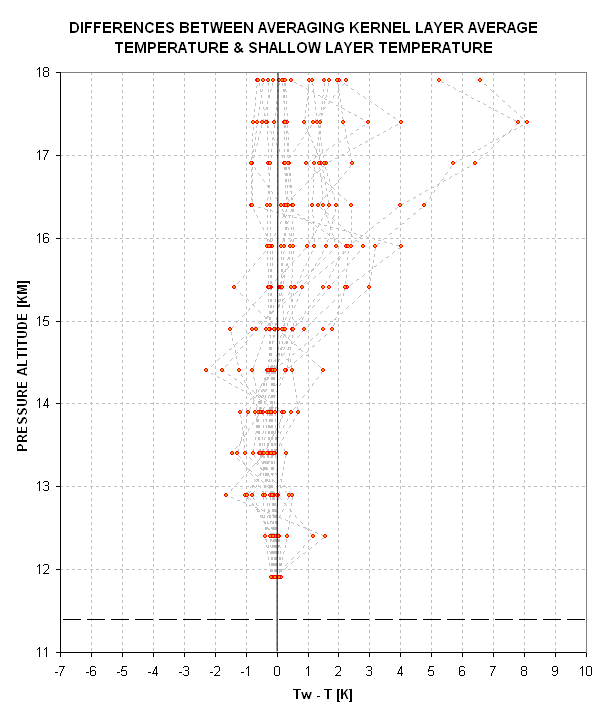
Figure 3. Example of difference between Tw(z) and
T(z) for 17 RAOBs from the TOTE/VOTE mission. Data for only altitudes above flight level
(11.4 km) are shown.
In this figure there is a trend with altitude for the individual
comparisons of retrieved versus RAOB temperature. This is caused by the
persistence of a characteristic shape
of actual T(z). For example, two of the traces in this figure
correspond to Hawaii soundings, where the tropopause is always at 16 or
17 km. An averaging kernel with applicable altitudes hear these
altitudes can be expected to produce Tw that is always too high
compared with T. Effects such as this one can be removed by an
empirical offset adjustment, EOA(z), that should be applied to all
retrieved profiles as a final adjustment. (This was done for the
measured RMS(z) performance used for TOTE/VOTE data, below.)
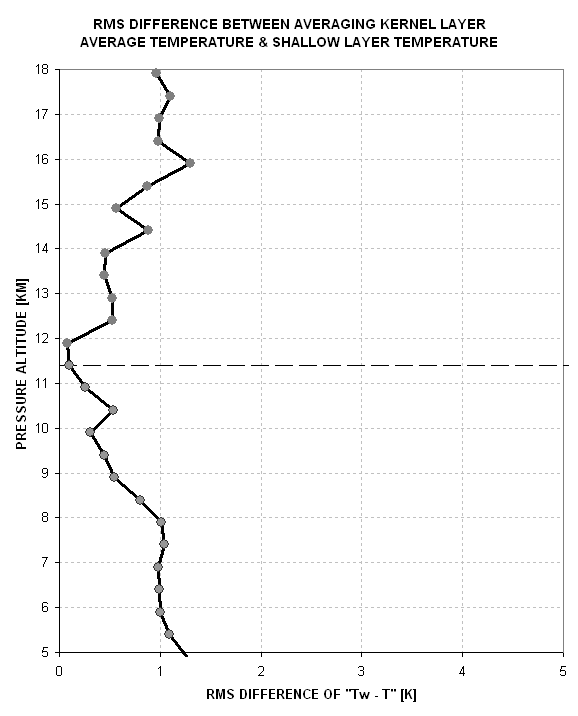
Figure 4. Example of RMS difference between Tw(z)
and T(z) for 17 RAOBs from the TOTE/VOTE mission.
What is the averaging kernel for flight level? It's not a delta
function, as implied by the procedure used for other altitudes. The
"averaging kernel" to be used for flight level should be based on the
finitie beamwidth function for the three channels used in the DC-8 MTP.
The applicable ranges for these channels are ~2.5, ~1.3 and ~0.6 km,
and the 7.7 degree HPBW function produces a source function versus
altitude shown in the next figure.
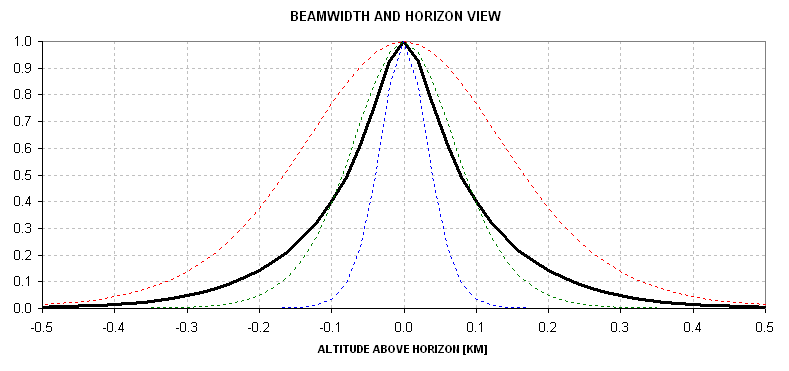
Figure 5. The MTP/DC8 uses 3 channels, with
beamwidths of ~7.7 degrees FWHM, and when flying at 11.4 km the
applicable ranges of 2.5, 1.3 and 0.6 km correspond to altitude source
functions shown by the dotted traces. The average trace (black)
corresponds to using the average brightness temperature for the three
channels to establish outside air temperature.
In this figure the average trace (black) should be used as an "averaging kernel" when calculating the layer average brightness temperature for the horizon view used to establish a flight level air temperature. When this is done for the 17-RAOB archive in use for this demonstration the RMS difference between Tw and T is 0.08 K. I note here that this RMS of 0.08 K is artificially low since I'm using RAOBs with poor altitude resolution and invariably over the small altitude region encompassed by the horizontal view source function only one straight line segment of of the RAOB data are sampled and this will produce a zero difference beetween Tw and T when in fact the difference is finite. I will estimate that if the data sampling were closer to true a Tw-T difference of ~0.10 K would be found. That value is used in Fig. 4.
Example of Expected PerformanceI have chosen to calculate RMS(z) for a DC-8 mission for which I
have already performed an exhaustive evaluation of RMS(z) performance.
I will use the TOTE/VOTE mission, December, 1995 to February, 1996,
which was based mostly in Hawaii. The specific goal of this section is
to compare achieved RMS(z) performance with best possible RMS(z)
performance for this mission. My purpose is to determine how closely
achieved performance approaches best possible performance.
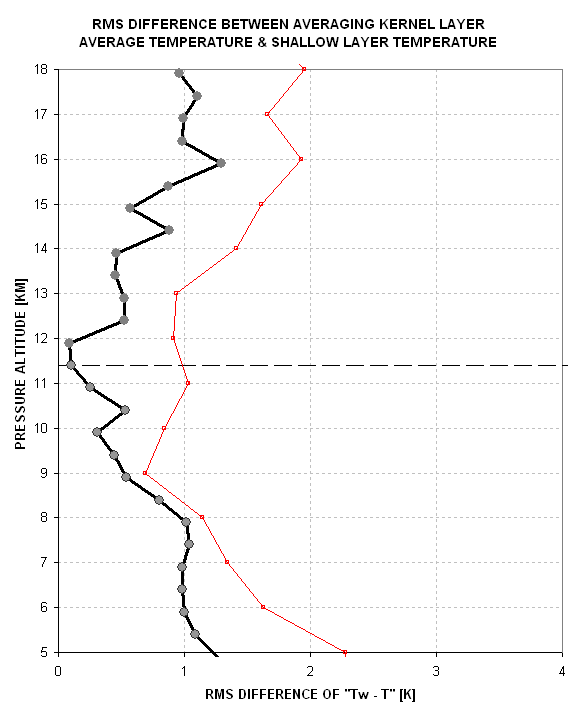
Figure 6. Measured RMS(z) performance (red) for
TOTE/VOTE DC-8 mission, 1992 (details in text), compared with predicted
"best possible" (black, same as shown in Fig. 4).
In this figure the measured performance is obtained by comparing
retrieved air temperature profiles with nearby RAOBs, described at TOTE/VOTE
calibration and RMS Performance Evaluation.
Note the expected behavior of measured performance being worse than
"best possible" performace at all altitudes. The difference between
these two profiles indicates the presence of an imperfect calibration
and/or retrieval algorithm. This difference profile is shown in the
next figure.
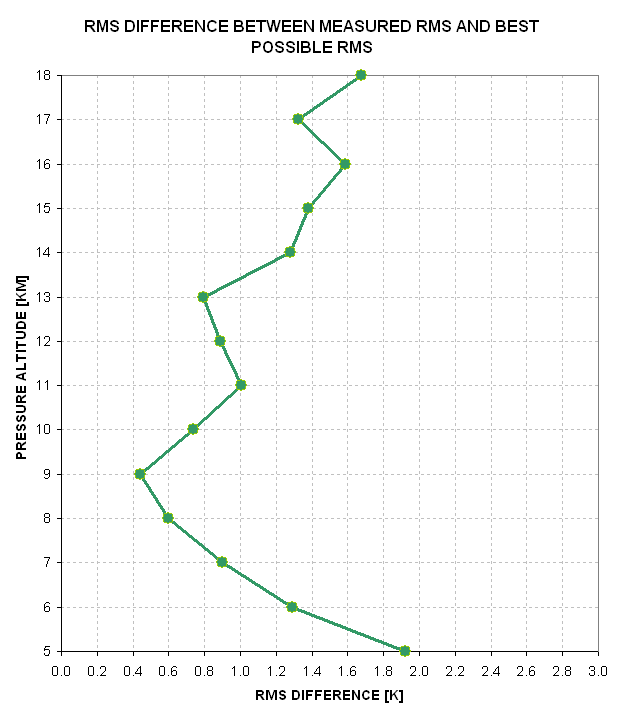
Figure 7. Residual uncertainty in retrieved profiles
due to calibration errors and retrieval procedure shortcomings.
This figure shows that the retrieved temperature profiles for this
mission had an accuracy that was limited by either systematic
calibration errors or retrieval algorithm shortcomings, or both, and
that these two shortcomings contributed ~1.0 K for the altitude region
7 to 13 km, and less than 2.0 K from 5 to 18 km. The "residual
uncertainty" profile in this figure represents how much improvement
could theorettically be achieved by performing better calibrations
and/or better retrieval algorithms. The goal for any MTP mission is to
reduce the residual uncertainty to as close to zero as possible, for
all altitudes.
It is possible for the "residual uncertainty" profile to be better
than zero, or become "imaginary." In other words, it is possible for
retrieved T(z) to be better than "best possible." This is because "best
possible," as used here, is based on the assumption that averaging
kernels are an appropriate way to represent the retrieval process. Dr.
M. J. Mahoney has developed clever "iterative statistical retrieval"
procedures that can produce T(z) profiles that are better than a
classical Backus-Gilbert retrieval procedure. For example, a set of
global retrieval coefficients can be used to produce an approximate
T(z) profile, and this can be used to select which "profile category"
has been encountered, and another retrieval *using the same
observables) can be performed using a set of retrieval coefficients
calculated (before the mission, for example) based on RAOB T(z)
profiles that belong to that "profile category." This process can be
repeated as many times as desired, or preferably until some objective
criterion of convergence has been met.
Another retrievval scheme that Dr. Mahoney has developed can be
employed a day after the flight in question, when RAOBs from along the
flight track are available for the time of the flight over those RAOB
sites. For example, consider a specific time in a flight that passed
near RAOB sites. The time of interest may correspond to part way
between sites, and part way from one RAOB sampling time and the next
one. A spatial and temporal interpolation can be performed to arrive at
a RAOB-suggested profile. This profile can be used as a a template for
a search through a large data base of RAOBs to produce a list of actual
RAOBs that resembled the template. Ideally, more than 100 such RAOBs
would be found. This set of RAOBs can then be used to calculate a set
of retrieval coefficients for use with the observables that led to
their selection. Amazinlgy good performance can be achieved using this
technique. The averaging kernels associated with this retrieval
coefficient set would be a misleading guide to expected accuracy, due
to the the fact that extra information was used to generate the
coeffficients and this information is not explicitly contained in the
coefficients. Of course, any benefits from this retrieval algorithm
require that calibration errors are small. The only benefit that can be
achieved should be thought of as a means for narrowing the altitude
thickness of the averaging kernel (that is not reflected by the
thickness of the averaging kernel associated with the retrieval
coefficients).
It remains to be demonstrated whether a performance that is better
than "best possible" can be achieved in practice. This can be a future
project for MTP researchers.
____________________________________________________________________
This site opened: November 13, 2004. Last Update: November 22, 2004